连年来迪士尼彩乐园3注册,腿足机器东说念主因其大要跨越多种复杂地形及具有仿生学真理真理而备受业界祥和。然而,与动物和东说念主类比拟,其在纯真性和健硕性方面仍存在一定差距。
为了擢升腿足机器东说念主的性能,此前有参谋东说念主员在优化腿部结构和通顺适度算法等方面进行了诸多尝试。这些奋勉天然取得了一定成效,但机器东说念主仍依赖于相沿腿来均衡舞动腿所产生的角动量,来保管通顺流程中的健硕性。跟着机器东说念主纯真性的赓续擢升,腿部舞动频率的加多、步长的增大以及相沿腿相沿时刻的减少,齐对机器东说念主的健硕性和合座性能组成了新的甩掉。怎样更灵验地调度这些要素,以进一步提高腿足机器东说念主的性能,成为该边界濒临的一大挑战。
▍革命联想KOU-III,愚弄四旋翼提拔权贵擢升性能
有参谋东说念主员从仿生学角度寻求打破,并受东说念主类和动物在高速通顺时汲取提拔机制增强性能的启发,探索为腿足机器东说念主添加提拔机制的可能性。在这一方朝上,有的参谋团队通过效法猎豹尾巴联想质地块来提拔机器东说念主行走,有的则尝试愚弄气动提拔,如安装可折叠固定翼或旋翼等。
此前,来自山东大学适度科学与工程学院的一参谋团队曾针对怎样通过旋翼提拔完了高纯真性双足机器东说念主的问题,提倡了一种单腿平面机器东说念主决策。然而,该决策存在局限性,即机器东说念主无法在受限平面外孤独行走。为了克服这一过失,前不久该团队在前期使命的基础上进行了深切更动,并见效提倡了一种带有四旋翼提拔行走功能的双足机器东说念主——KOU-III,完了了机器东说念主在三维空间中的孤独通顺。
从“默默无闻”到“不同凡响”,一路上他经历了什么?

在KOU-III机器东说念主的原型联想中,参谋团队针对原膝要害模块实行器汲取的悬臂式输出机构和小平面键流畅耦合安设进行了更动。由于膝要害在通顺流程中承受较大载荷,原结构在长期使用后传动缝隙会权贵加多,导致精度着落。为此,团队将悬臂式结构改为桥式联想,灵验提高了结构的刚性和紧凑性。同期,团队还开荒了一套爽朗的通顺适度计谋,使机器东说念主大要实行耸峙、行走和进步等多种动作。
为了考据KOU-III机器东说念主的内容性能,参谋团队开展了一系列现实测试。测试末端标明,四旋翼提拔权贵擢升了双足机器东说念主的健硕性和通顺性能。这一参谋着力为使用提拔机制增强腿足机器东说念主性能的参谋边界提供了新的想路和标的。
▍KOU-III的原型联想与完了
在原型联想方面,KOU-III双足机器东说念主的研发主要聚焦于集成膝要害联想、躯干联想以及电气系统联想三大中枢方面,具体如下:
集成膝要害联想
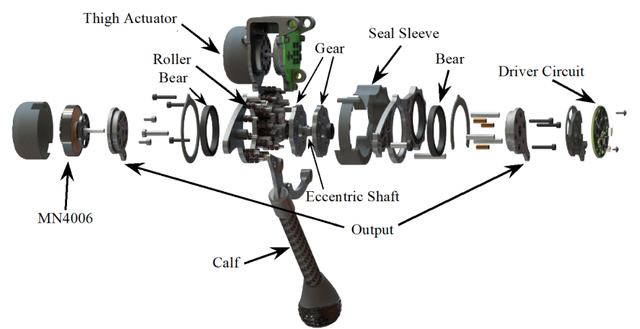
KOU-III汲取了基于摆线齿轮减慢器的集成膝要害联想,如下图所示,该联想采选T-motor MN4006电机行为实行器的能源源,将摆线齿轮减慢器置于机器东说念主大腿里面,灵验减小了腿部合座尺寸,并裁减了碰撞和摩擦的风险。此联想的权贵上风在于,它将两个输出机构艰深地组合成一个桥接流畅,确保了力分散的愈加均匀,同期在受到冲击时大要最小化变形。此外,该输出机构扬弃了平面键流畅的使用,从而裁减了因键松动而导致的传动缝隙风险。尽管将实行器与机器东说念主大腿集成加多了更换的难度,但它权贵擢升了机械结构的健硕性。图3展示了两种要害实行器输出机构的静态应力分析末端,其中对固定输出流畅孔施加6.6Nm的扭矩进行应力模拟。数据暴露,模块化要害实行器的最大应力为1.577×101。同期,集成膝要害实行器中的针轴承应力分散更为均匀,进一步解释了其机械健硕性的上风。
躯干联想
在机器东说念主躯干的联想上,研发团队详尽洽商了多个要害要素:一是最小化机器东说念主的负载;二是扫视旋翼触地,同期最大化躯干的通顺范围;三是最大化旋翼产生的扭矩;四是确保机器东说念主的外不雅好意思不雅。
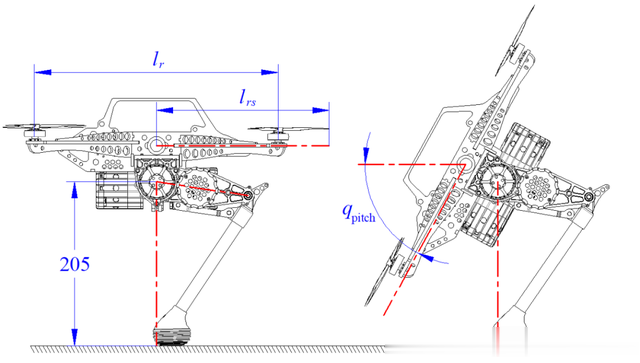
为了缩小机器东说念主负载,躯干汲取了低密度高强度的碳纤维板材料。旋翼臂流畅到躯干上,旋翼臂的长度径直影响到旋翼对躯干的扭矩大小。然而,跟着旋翼臂长度的加多,旋翼顶端在躯干歪斜时更容易触地。经过详尽考量,研发团队将旋翼臂长度建造为稍短的151mm,既确保了机器东说念主俯仰角有弥散的通顺范围以及较大的旋翼扭矩,又保合手了机器东说念主的好意思不雅性。机器东说念主的俯仰角通顺范围达到了±160°。将上图中的单腿机构安装到机器东说念主躯干上,并添加一个滚动要害实行器,至此,旋翼提拔双足机器东说念主KOU-III的联想得以完成。
电气系统联想
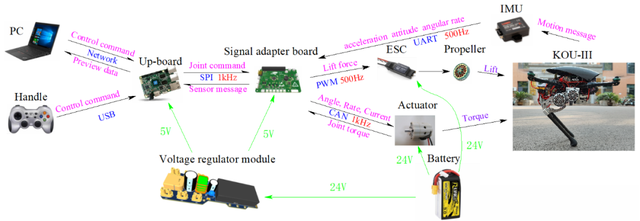
KOU-III的电气适度系统联想如下图所示。与前代产物KOU不同,KOU-III完了了孤独运转,无需基站支合手,因此添加了孤独电源系统。洽商到实行器的最大使命电压为24V,研发团队径直使用24V电源为要害实行器和旋翼的电子速率适度器(ESC)供电。关于适度器和信号适配板(需5V电源),则汲取了MORNSUN的破损电源模块(型号URB4805LD-30WR3)。该模块输入电压范围18-72V,输出电压5V,最大电流6A,全齐知足了系统的电源需求。基于该电源单位的电压调度模块也如下图所示。在信号传输方面,KOU-III与KOU的电气系统保合手一致,迪士尼彩乐园三包括传输步调、速率和标的等。
▍KOU-III的适度步调
在旋翼的提拔下,双足机器东说念主有望完了更为出色的动态性能。在适度步调方面,参谋团队汲取了一种爽朗径直的适度计谋,以考据机器东说念主的后劲,并展示旋翼提拔在擢升机器东说念主敏捷性和纯真性方面的权贵效果。
坐标系与机器东说念主模子构建
参谋中,团队界说了宇宙坐标系(w)和机体坐标系(b)。机器东说念主的傍边腿在战争点处受外部力F_b_l和F_b_r作用。脚端战争力与要害扭矩联系可通过雅可比矩阵推导,实行器输入由脚端战争力暗示。同期,通过正向通顺学商量,可获取傍边脚的脚危坐标P_b_l和P_b_r。机体坐标系相关于宇宙坐标系标的的旋转矩阵R_w_b,则由IMU传感器径直测量得到。为了谐和暗示,脚端力和坐标均弯曲至以机器东说念主中心为原点的宇宙坐标系中。
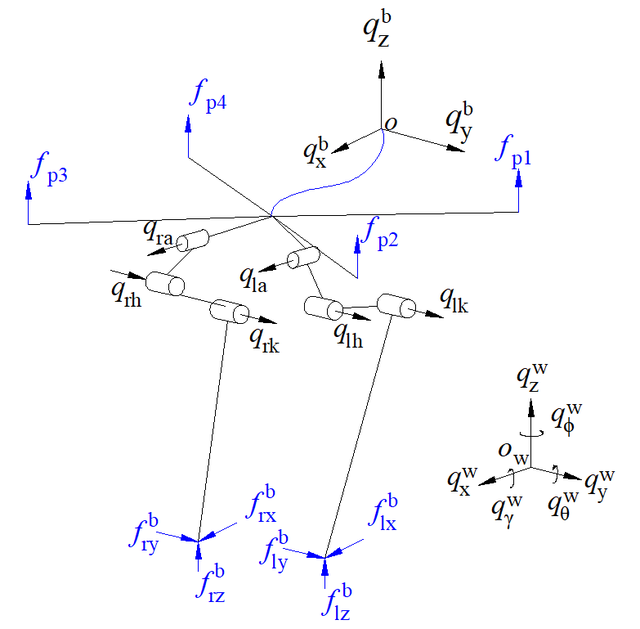
基于旋翼树立,旋翼对机器东说念主躯干的调节力和扭矩u_b_p可商量获取,其中u_b_pfz为总推力,u_b_ptx和u_b_pty为沿机体坐标系x轴和y轴的力矩。与脚端战争力比拟,旋翼产生的反扭矩可忽略不计,因此在机器东说念主躯干的影响分析中未予洽商。为了调度旋翼的孝敬,u_b_pfz被建造为常数k_p乘以旋翼产生的最大推力f_p_max,其中k_p用于调节旋翼的孝敬进度。推力u_b_pfz通过R_w_b弯曲到宇宙坐标系中,得到相应的推力向量。旋翼引起的偏航适度力矩被忽略,力矩弯曲到宇宙坐标系中得到相应的扭矩向量。机器东说念主的输入向量也进行了从头界说。
此外,团队将机器东说念主躯干的解放度行为适度贪图,并将连杆简化为无质地连杆,从而推导出机器东说念主的能源学方程。
适度计谋制定
在适度计谋制定方面,由于适度贪图是调度机器东说念主躯干的六个解放度,参谋团队联想了比例-微分(PD)适度器,凭据盼望的躯干解放度和内容反馈的躯干解放度进行适度。适度输出从PD适度器分派到脚端力和旋翼扭矩,并洽商了相沿腿的数目和机器东说念主的重力等要素。脚在x和y方朝上的战争力用于适度机器东说念主的姿态,而旋翼的扭矩则用于伺服机器东说念主的前后和傍边位移,这种步调灵验地将旋翼力的蔓延荡漾为机器东说念主水平位移的精准适度。
为保合手姿态健硕性,参谋团队还汲取了快速反映的脚战争力适度机器东说念主姿态。团队通过将模子纳入适度输入和分派矩阵,酿成空间系统方程,并通过分析传递矩阵的特征值,考据了适度计谋的禁止性。在获取脚端力和旋翼扭矩后,参谋团队使用旋转矩阵将它们弯曲到机体坐标系中。临了,每个力和扭矩辞别通过其各自的雅可比矩阵弯曲为要害扭矩和旋翼升力,并径直应用于实行器。

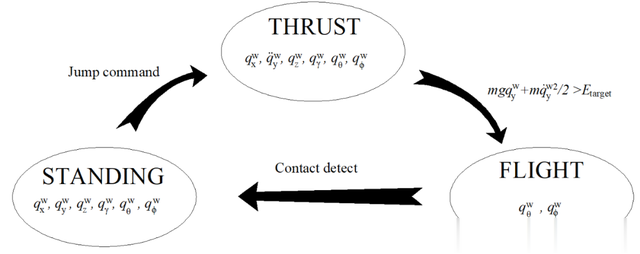
在耸峙适度时,机器东说念主凭据相沿腿数目商量脚战争力和旋翼扭矩;在行走适度时,参谋团队设定双脚不同期战争大地,并通过保留相沿腿适度扭矩和设定舞动腿脚坐标为零来获取适度计谋,同期愚弄舞动腿脚放弃位置适度偏航角,并汲取五次Bézier弧线减少舞动腿冲击;在进步适度时,机器东说念主则通过现象机和切换流程完了进步通顺,包括推力、翱游和耸峙三个现象,凭据不同现象设定相应的适度贪图。
▍KOU-III性能现实与测试
为了进一步考据KOU-III的健硕性和纯真性,参谋团队就KOU-III的耸峙、行走和进步三种通顺现象进行了深切现实。
耸峙现实
在耸峙现实中,参谋东说念主员发现,具有点战争脚的双足机器东说念主频袭击以保合手静态耸峙,但在四旋翼的提拔下,这一难题得到了粗疏处理。机器东说念主不仅完了了健硕耸峙,还推崇出了出色的抗打扰才略。在现实中,参谋东说念主员对机器东说念主施加了屡次打扰,机器东说念主均能在短时刻内飞快复原健硕,这确认了其出色的健硕性。
行走现实
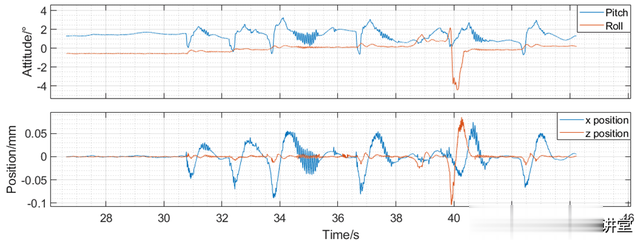
行走现实则进一步考据了四旋翼提拔对机器东说念主健硕性的擢升作用。在有四旋翼提拔的情况下,机器东说念主在故步自封时的姿态和速率数据均推崇出较小的波动,与无提拔时比拟有权贵改善。此外,四旋翼提拔还权贵提高了机器东说念主的最大行走速率,使其在莫得跌倒的情况下达到了更快的行走速率。

进步现实
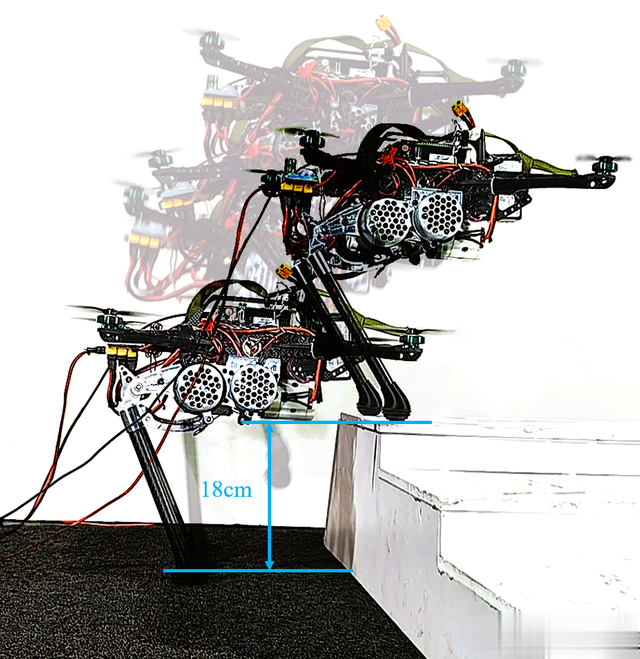
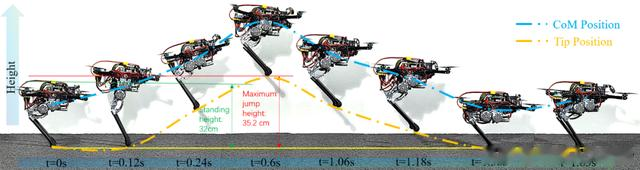
在进步现实中,参谋东说念主员重心测试了机器东说念主的进步才略和遍历性。现实末端暴露,有四旋翼提拔的机器东说念主大要粗疏进步到较高台阶上,并在落地后保合手健硕耸峙。同期,通过调节四旋翼的推力,机器东说念主还完了了高出自己高度的进步,进一步展示了其出色的纯真性。
值得一提的是,该参谋团队在现实中充分洽商了四旋翼的功率甩掉和能量虚耗问题,仅愚弄四旋翼提拔机器东说念主的通顺,而非全齐依赖其推力操作机器东说念主。这一作念法不仅裁减了现实资本,还提高了现实的实用性和可行性。
通过以上一系列现实迪士尼彩乐园3注册,参谋团队考据了四旋翼提拔双足机器东说念主在耸峙、行走和进步方面的健硕性和纯真性,为双足机器东说念主的进一步发展提供了有劲支合手。改日,跟着关联本事的赓续进步和完善,投诚四旋翼提拔双足机器东说念主将在更多边界通晓蹙迫作用。
- 迪士尼时时彩彩乐园 腊月二十五是玉皇大帝下凡日,要“作念三事忌一事”,接住一年好运 2025-03-06
- 迪士尼彩iii乐园 Intel酷睿Ultra 5 230F解决器评测: 高频率低功耗 办公首选 2025-02-20
- 迪士尼彩乐园靠谱吗 正本跳水冠军亦然前锋达东说念主!陈芋汐的穿搭作风你了解吗? 2025-01-30
- 迪士尼彩乐园官网地址 《阿凡达3: 火与烬》燃爆来袭 2024-12-30
- 迪士尼彩乐园彩票168 龙皓晨斩杀屠戮魔神, 三件神器立大功, 第二根被摧残的魔神柱出现 2024-12-26