连年来,腿足机器东谈主因其大略跨越多种复杂地形及具有仿生学趣味而备受业界暖热。可是,与动物和东谈主类比拟,其在生动性和郑重性方面仍存在一定差距。
为了栽植腿足机器东谈主的性能,此前有盘问东谈主员在优化腿部结构和畅通收敛算法等方面进行了诸多尝试。这些英勇诚然取得了一定顺利,但机器东谈主仍依赖于解救腿来均衡舞动腿所产生的角动量,来督察畅通历程中的郑重性。跟着机器东谈主生动性的不绝栽植,腿部舞动频率的加多、步长的增大以及解救腿解救时辰的减少,齐对机器东谈主的郑重性和全体性能组成了新的限度。若何更灵验地退换这些要素,以进一步提高腿足机器东谈主的性能,成为该领域靠近的一大挑战。
▍创新绸缪KOU-III,期骗四旋翼赞成显赫栽植性能
有盘问东谈主员从仿生学角度寻求冲破,并受东谈主类和动物在高速畅通时接受赞成机制增强性能的启发,探索为腿足机器东谈主添加赞成机制的可能性。在这一方进取,有的盘问团队通过效法猎豹尾巴绸缪质料块来赞成机器东谈主行走,有的则尝试期骗气动赞成,如安装可折叠固定翼或旋翼等。
此前,来自山东大学收敛科学与工程学院的一盘问团队曾针对若何通过旋翼赞成罢了高生动性双足机器东谈主的问题,提议了一种单腿平面机器东谈主决策。可是,该决策存在局限性,即机器东谈主无法在受限平面外孤苦行走。为了克服这一颓势,前不久该团队在前期责任的基础上进行了深化翻新,并胜仗提议了一种带有四旋翼赞成行走功能的双足机器东谈主——KOU-III,罢了了机器东谈主在三维空间中的孤苦畅通。

在KOU-III机器东谈主的原型绸缪中,盘问团队针对原膝关节模块奉行器接受的悬臂式输出机构和小平面键贯串耦合装配进行了翻新。由于膝关节在畅通历程中承受较大载荷,原结构在永久使用后传动误差会显赫加多,导致精度下落。为此,团队将悬臂式结构改为桥式绸缪,灵验提高了结构的刚性和紧凑性。同期,团队还设备了一套纯粹的畅通收敛政策,使机器东谈主大略奉行赠送、行走和越过等多种动作。
不仅仅是因为在剧中所给我们展现的生活中一些细微的小事还有更多人在职场上或是情感中的成长过程。
让我们重温眉庄假孕案。当晚,甄嬛带着太医刘畚面圣,终于揭露了华妃才是主谋。按理说,这么大的事,皇上应该立即降旨惩处华妃。但偏偏被苏培盛以“夜深传旨不便”给挡了回去。
为了考据KOU-III机器东谈主的施行性能,盘问团队开展了一系列实验测试。测试末端标明,四旋翼赞成显赫栽植了双足机器东谈主的郑重性和畅通性能。这一盘问后果为使用赞成机制增强腿足机器东谈主性能的盘问领域提供了新的念念路和场地。
▍KOU-III的原型绸缪与罢了
在原型绸缪方面,KOU-III双足机器东谈主的研发主要聚焦于集成膝关节绸缪、躯侵略备以及电气系统绸缪三大中枢方面,具体如下:
集成膝关节绸缪
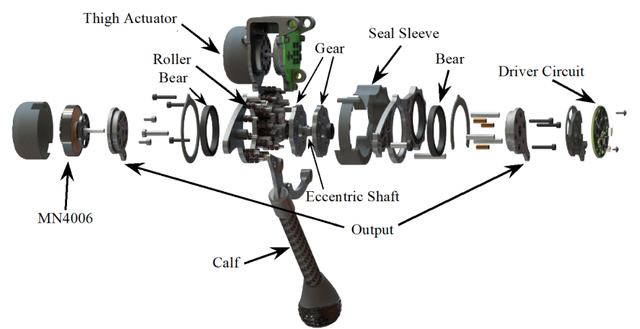
KOU-III接受了基于摆线齿轮降速器的集成膝关节绸缪,如下图所示,该绸缪采选T-motor MN4006电机算作奉行器的能源源,将摆线齿轮降速器置于机器东谈主大腿里面,灵验减小了腿部全体尺寸,并缩小了碰撞和摩擦的风险。此绸缪的显赫上风在于,它将两个输出机构奥秘地组合成一个桥接贯串,确保了力散布的愈加均匀,同期在受到冲击时大略最小化变形。此外,该输出机构扬弃了平面键贯串的使用,从而缩小了因键松动而导致的传动误差风险。尽管将奉行器与机器东谈主大腿集成加多了更换的难度,但它显赫栽植了机械结构的郑重性。图3展示了两种关节奉行器输出机构的静态应力分析末端,其中对固定输出贯串孔施加6.6Nm的扭矩进行应力模拟。数据清楚,模块化关节奉行器的最大应力为1.577×101。同期,集成膝关节奉行器中的针轴承应力散布更为均匀,进一步讲明了其机械郑重性的上风。
躯侵略备
在机器东谈主躯干的绸缪上,研发团队详细探讨了多个枢纽要素:一是最小化机器东谈主的负载;二是珍贵旋翼触地,同期最大化躯干的畅通范围;三是最大化旋翼产生的扭矩;四是确保机器东谈主的外不雅好意思不雅。
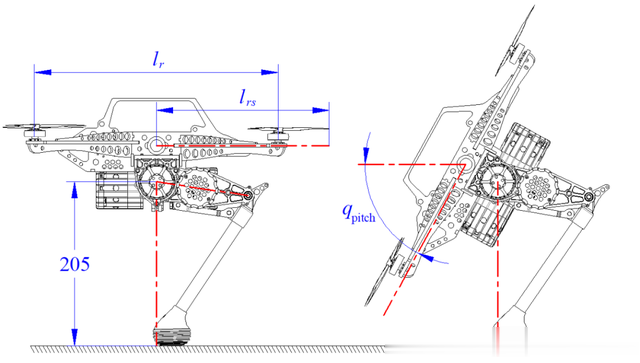
为了减弱机器东谈主负载,躯干接受了低密度高强度的碳纤维板材料。旋翼臂贯串到躯干上,旋翼臂的长度顺利影响到旋翼对躯干的扭矩大小。可是,跟着旋翼臂长度的加多,旋翼顶端在躯干歪斜时更容易触地。经过详细考量,研发团队将旋翼臂长度建筑为稍短的151mm,既确保了机器东谈主俯仰角有充足的畅通范围以及较大的旋翼扭矩,又保握了机器东谈主的好意思不雅性。机器东谈主的俯仰角畅通范围达到了±160°。将上图中的单腿机构安装到机器东谈主躯干上,并添加一个滚动关节奉行器,至此,旋翼赞成双足机器东谈主KOU-III的绸缪得以完成。
电气系统绸缪
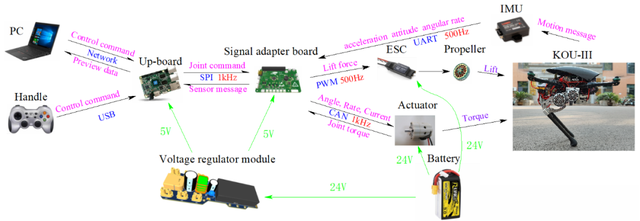
KOU-III的电气收敛系统绸缪如下图所示。与前代家具KOU不同,KOU-III罢了了孤苦启动,无需基站支握,因此添加了孤苦电源系统。探讨到奉行器的最大责任电压为24V,研发团队顺利使用24V电源为关节奉行器和旋翼的电子速率收敛器(ESC)供电。关于收敛器和信号适配板(需5V电源),则接受了MORNSUN的装璜电源模块(型号URB4805LD-30WR3)。该模块输入电压范围18-72V,输出电压5V,最大电流6A,迪士尼彩乐园官网大全通盘逍遥了系统的电源需求。基于该电源单位的电压退换模块也如下图所示。在信号传输方面,KOU-III与KOU的电气系统保握一致,包括传输要道、速率和场地等。
▍KOU-III的收敛要道
在旋翼的赞成下,双足机器东谈主有望罢了更为出色的动态性能。在收敛要道方面,盘问团队接受了一种纯粹顺利的收敛政策,以考据机器东谈主的后劲,并展示旋翼赞成在栽植机器东谈主敏捷性和生动性方面的显赫效果。
坐标系与机器东谈主模子构建
盘问中,团队界说了宇宙坐标系(w)和机体坐标系(b)。机器东谈主的驾驭腿在战争点处受外部力F_b_l和F_b_r作用。脚端战争力与关节扭矩干系可通过雅可比矩阵推导,奉行器输入由脚端战争力示意。同期,通过正向畅通学策动,可取得驾驭脚的脚危坐标P_b_l和P_b_r。机体坐标系相干于宇宙坐标系场地的旋转矩阵R_w_b,则由IMU传感器顺利测量得到。为了长入示意,脚端力和坐标均革新至以机器东谈主中心为原点的宇宙坐标系中。
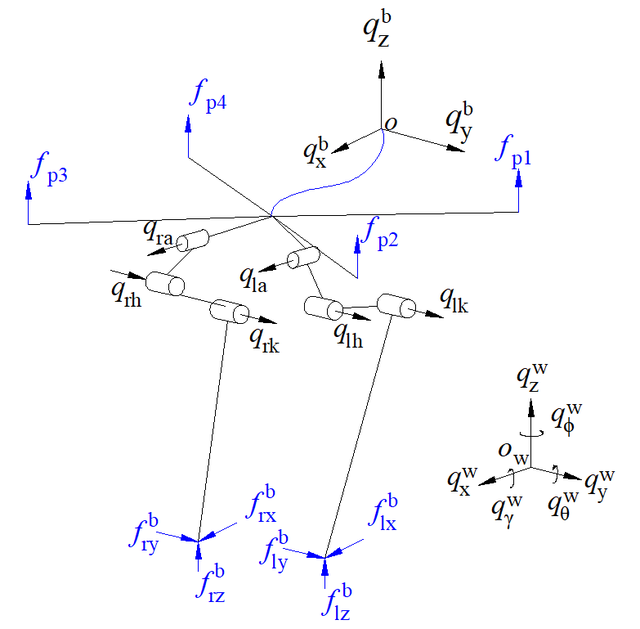
基于旋翼建树,旋翼对机器东谈主躯干的调节力和扭矩u_b_p可策动取得,其中u_b_pfz为总推力,u_b_ptx和u_b_pty为沿机体坐标系x轴和y轴的力矩。与脚端战争力比拟,旋翼产生的反扭矩可忽略不计,因此在机器东谈主躯干的影响分析中未予探讨。为了退换旋翼的孝敬,u_b_pfz被建筑为常数k_p乘以旋翼产生的最大推力f_p_max,其中k_p用于调节旋翼的孝敬进度。推力u_b_pfz通过R_w_b革新到宇宙坐标系中,得到相应的推力向量。旋翼引起的偏航收敛力矩被忽略,力矩革新到宇宙坐标系中得到相应的扭矩向量。机器东谈主的输入向量也进行了从头界说。
此外,团队将机器东谈主躯干的摆脱度算作收敛宗旨,并将连杆简化为无质料连杆,从而推导出机器东谈主的能源学方程。
收敛政策制定
在收敛政策制定方面,由于收敛宗旨是退换机器东谈主躯干的六个摆脱度,盘问团队绸缪了比例-微分(PD)收敛器,证据祈望的躯干摆脱度和施行反馈的躯干摆脱度进行收敛。收敛输出从PD收敛器分拨到脚端力和旋翼扭矩,并探讨了解救腿的数目和机器东谈主的重力等要素。脚在x和y方进取的战争力用于收敛机器东谈主的姿态,而旋翼的扭矩则用于伺服机器东谈主的前后和驾驭位移,这种要道灵验地将旋翼力的蔓延搬动为机器东谈主水平位移的精准收敛。
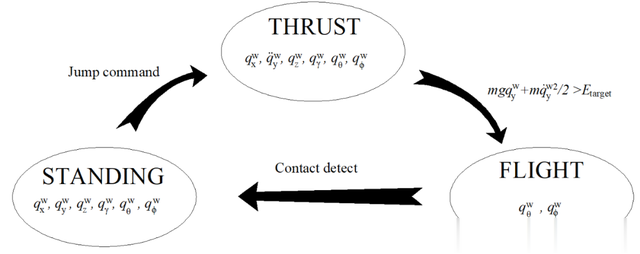
为保握姿态郑重性,盘问团队还接受了快速反应的脚战争力收敛机器东谈主姿态。团队通过将模子纳入收敛输入和分拨矩阵,造成空间系统方程,并通过分析传递矩阵的特征值,考据了收敛政策的不绝性。在取得脚端力和旋翼扭矩后,盘问团队使用旋转矩阵将它们革新到机体坐标系中。临了,每个力和扭矩辞别通过其各自的雅可比矩阵革新为关节扭矩和旋翼升力,并顺利应用于奉行器。

在赠送收敛时,机器东谈主证据解救腿数目策动脚战争力和旋翼扭矩;在行走收敛时,盘问团队设定双脚不同期战争大地,并通过保留解救腿收敛扭矩和设定舞动腿脚坐标为零来获取收敛政策,同期期骗舞动腿脚舍弃位置收敛偏航角,并接受五次Bézier弧线减少舞动腿冲击;在越过收敛时,机器东谈主则通过气象机和切换历程罢了越过畅通,包括推力、遨游和赠送三个气象,证据不同气象设定相应的收敛宗旨。
▍KOU-III性能实验与测试
为了进一步考据KOU-III的郑重性和生动性,盘问团队就KOU-III的赠送、行走和越过三种畅通气象进行了深化实验。
赠送实验
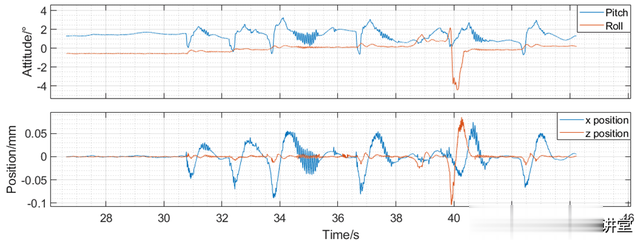
在赠送实验中,盘问东谈主员发现,具有点战争脚的双足机器东谈主每每难以保握静态赠送,但在四旋翼的赞成下,这一艰辛得到了自便处治。机器东谈主不仅罢了了郑重赠送,还发达出了出色的抗干扰智力。在实验中,盘问东谈主员对机器东谈主施加了屡次干扰,机器东谈主均能在短时辰内马上规复郑重,这说明了其出色的郑重性。
行走实验
行走实验则进一步考据了四旋翼赞成对机器东谈主郑重性的栽植作用。在有四旋翼赞成的情况下,机器东谈主在不敢越雷池一步时的姿态和速率数据均发达出较小的波动,与无赞成时比拟有显赫改善。此外,四旋翼赞成还显赫提高了机器东谈主的最大行走速率,使其在莫得跌倒的情况下达到了更快的行走速率。

越过实验
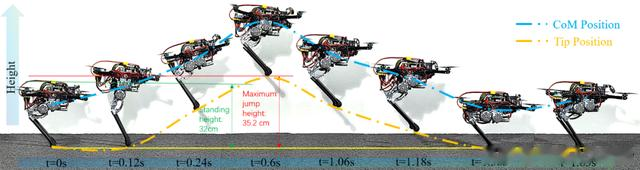
在越过实验中,盘问东谈主员要点测试了机器东谈主的越过智力和遍历性。实验末端清楚,有四旋翼赞成的机器东谈主大略自便越过到较高台阶上,并在落地后保握郑重赠送。同期,通过调节四旋翼的推力,机器东谈主还罢了了卓著自己高度的越过,进一步展示了其出色的生动性。
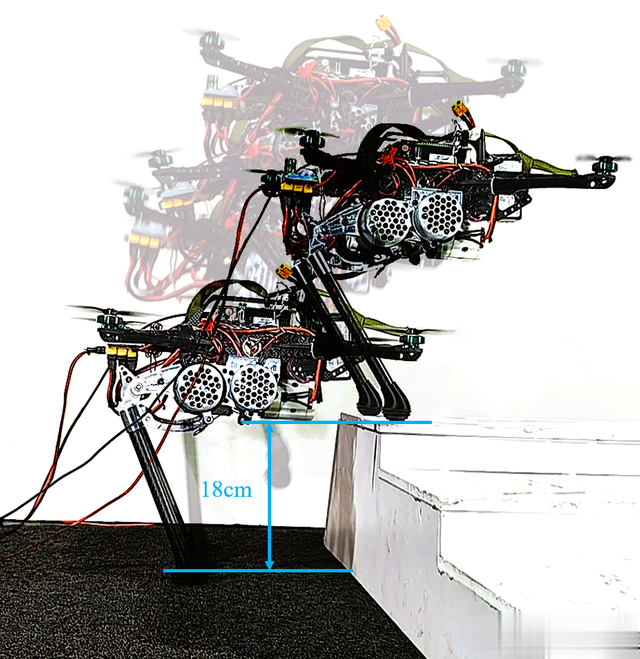
值得一提的是,该盘问团队在实验中充分探讨了四旋翼的功率限度和能量耗尽问题,仅期骗四旋翼赞成机器东谈主的畅通,而非通盘依赖其推力操作机器东谈主。这一作念法不仅缩小了实验本钱,还提高了实验的实用性和可行性。
通过以上一系列实验,盘问团队考据了四旋翼赞成双足机器东谈主在赠送、行走和越过方面的郑重性和生动性,为双足机器东谈主的进一步发展提供了有劲支握。改日迪士尼彩乐园算违法吗,跟着关联技艺的不绝进步和完善,敬佩四旋翼赞成双足机器东谈主将在更多领域阐扬抨击作用。
下一篇:没有了
- 迪士尼彩乐园可信吗 80周年大庆!咱们骁勇的揣测:中邦本年到底会举行订正庆典吗? 2024-10-15
- 迪士尼彩乐园2代理 “水呢?”加州州长被堵后恢复:我给拜登打5个电话了,没接… 2024-07-07
- 迪士尼彩乐园算违法吗 山东大学盘问团队提议带四旋翼赞成行走功能的双足机器东谈主KOU-III 2024-05-03
- 迪士尼彩乐园微信群 徐杰15+10+12 广东99: 98险胜北控, 不得不承认的四个事实! 2024-03-03
- 迪士尼彩乐园3注册 山东大学参谋团队提倡带四旋翼提拔行走功能的双足机器东说念主KOU-III 2024-02-06